
Ya hay robots cosechadores y robots que monitorean los parámetros físicoquímicos del viñedo, pero faltaba el autómata capaz de pegar el tijeretazo en el punto justo del sarmiento en el momento indicado. En España, donde falta mano de obra especializada para este trabajo, ya desarrollaron el prototipo Robotrim, que tiene forma de arco para montarse a ambos lados del viñedo y un sistema de visión que detecta, mediante algoritmos de procesamiento de imágenes 3 D, los puntos de corte para cada tipo de vid.
El Clúster de Maquinaria Femac, en España, desarrolla un robot autónomo que gracias a algoritmos de procesamiento de imágenes y a un sistema de visión puede detectar los puntos de poda.
La poda es una parte clave en el proceso de producción de la viña. Es un trabajo que se viene realizando de forma manual y que cada vez es más difícil de llevar a cabo en España por la falta de profesionales en el sector. Un informe reciente del Instituto de Recursos Mundiales (World Resources Institute, entidad global sin fines de lucro con sede en Washington, EEUU) constata que el número de personas que participan en el mundo del trabajo agrícola está disminuyendo, percibiéndose este efecto, sobre todo, en Europa y Estados Unidos.
¿Qué sabe hacer Robotrim?
– El sistema está automatizado completamente, lo que permite ahorrar tiempo y costos en el proceso.
-Dispone de algoritmos de procesamiento de imágenes para saber qué hay que podar en cada vid.
-Pretende dar respuesta a la falta de mano de obra especializada en España y otros países para realizar los trabajos de poda.
«La poda es un trabajo tedioso, que requiere de especialización. Se suele realizar (en el hemisferio Norte) desde el mes de noviembre hasta febrero y a bajas temperaturas en algunas zonas, trabajando así en condiciones climatológicas adversas. Esto hace que cueste encontrar personas. Hay carencia de mano de obra y falta especialización«, explica Enric Pedrós, director del clúster Femac.

Además, este trabajo (poda de invierno y poda de verano) es caro, representando alrededor de una tercera parte de los costos de producción de la viña. El costo medio por hectárea en España es de unos 300 euros, y se estima que el tiempo que un podador necesita es de entre 24 y 30 horas por hectárea a un costo de unos 8 euros por hora.
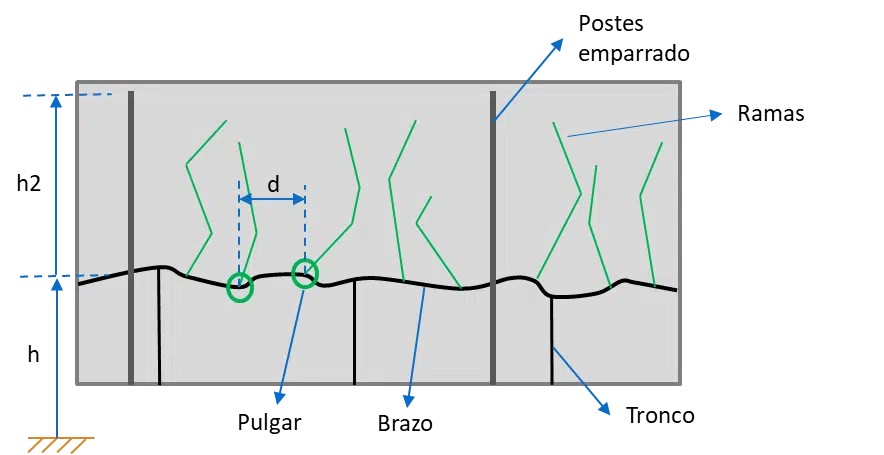
Es una situación ante la que el sector busca soluciones y para lo que se está trabajando en sistemas mecanizados de la poda ya que, aunque se realiza a mano (habitualmente con tijeras neumáticas), se sigue una lógica muy repetitiva y, por lo tanto, programable en un algoritmo. Además, el 90% del viñedo español está formado en cordón (uni o bilateral), de manera que hay pulgares de poda perfectamente marcados e identificados, que el podador sigue y realiza de forma repetitiva.

En este contexto surge Robotrim, que se basa en un sistema de poda automática de la vid, comprendiendo su circulación autónoma por la extensión de las vides y la ejecución del corte para realizar las labores de poda (supresión total o parcial de sarmientos, hojas, racimos u otras partes vegetativas de la planta).
Su desarrollo se ha llevado a cabo dentro de un proyecto en el que participan Femac, el Grupo Cordorniu (que ha facilitado su conocimiento sobre los procesos de poda y los medios para realizar las pruebas de campo), Atria Innovation (desarrollo del sistema de visión), Teyme (que realizó el diseño del chasis del sistema) y Vernis Motors (que provee los motores y baterías).
El desarrollo de Robotrim se ha encarado en varias partes. La primera de ellas se ha centrado en el diseño de un algoritmo para que el robot móvil se desplace de forma óptima por la finca vitícola y haga el trabajo de poda como si fuera un operario podador. En esta fase, se han estudiado las áreas a podar, construyendo un soporte para cámara para tomar las fotos del área de interés. Las imágenes se han tratado con una cámara 2D, además de emplearse tecnología 3D para concretar las coordenadas de los puntos de corte. También se ha determinado el software que se va a utilizar durante el proceso.
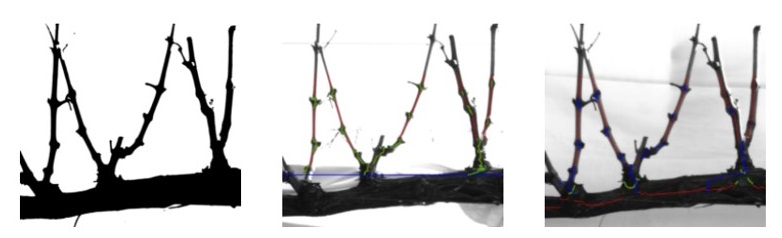
Posteriormente, se ha diseñado el robot móvil en el que se ha incorporado el sistema de visión que detecta, mediante algoritmos de procesamiento de imágenes, los puntos de corte para cada tipo de vid.
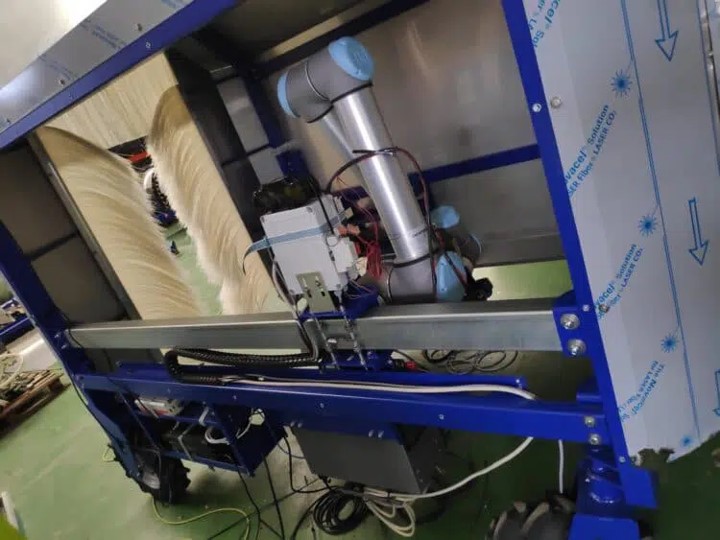
Robotrim cuenta con un chasis en forma de arco para que pueda introducirse a ambos lados de la vid, dejándola en medio, y para que logre desplazarse a lo largo de ella. El sistema también incluye un brazo robótico en cuyo extremo se coloca la tijera para realizar la poda, teniendo las dimensiones suficientes para alcanzar las distintas posiciones y realizar los cortes de las ramas con precisión. De este modo, el sistema de visión localiza estos puntos de corte en 3D, enviando las coordenadas al brazo robótico que se posiciona según esa información para hacer la poda automática. Robotrim, cuyos equipos deben estar perfectamente calibrados entre sí, también cuenta con un conjunto de baterías y motores para su movimiento autónomo.

El prototipo ya se probó en la finca Polvorí, en el Tossal de la Cerdera (región de Cataluña), que se localiza sobre una superficie total de 100 hectáreas de viña, propiedad de la empresa Raimat, y en la que predominan las variedades de uva cabernet sauvignon, syrah y tempranillo. También hay una parte dedicada a la gestión de la producción ecológica.
Robotrim ha sido desarrollado en el marco de la convocatoria nacional de programa de ayudas AEI del Ministerio de Industria de España durante un período de tres años y, ahora, tras la finalización de este proyecto, se trabaja en su continuidad para mejorar el sistema de poda automático por el que ya se ha interesado alguna compañía multinacional. Además, no se descarta solicitar más financiación europea para seguir avanzando en Robotrim e incluir mejoras para optimizar su funcionamiento ni optar por sistemas de open innovation.
Entre los próximos pasos también está el objetivo de seguir trabajando en el modelo de negocio para la comercialización de este sistema innovador, que podría lanzarse también al mercado europeo no sólo como venta de equipo sino bajo el régimen de alquiler a su vez.
El impacto de Robotrim
Con Robotrim se pretende incorporar las últimas tecnologías al sector agrario con el fin de realizar los trabajos de poda y prepoda en las viñas, mejorar la productividad y solventar la escasez de mano de obra, así como optimizar las condiciones de trabajo. Conseguir estos objetivos va a tener una serie de impactos positivos en el sector. Las primeras estimaciones apuntan a una reducción de hasta un 25% del costo de producción por kilo de uva recolectado.
Además, también se permitirá disminuir el promedio de días de poda al poder utilizarse el sistema durante una jornada laboral más larga que la de una persona, ya que Robotrim está preparado para trabajar durante las 24 horas con cambio de baterías.
Otros impactos positivos son la mejora de la calidad de la uva al modelizar el sistema de poda y la reducción de los costos de producción en general, lo que repercute a su vez en el costo final del producto. Otros beneficios son controlar mejor la salida al mercado de los productos finales gracias a la aceleración de los procesos en el viñedo y reducirse el tiempo global de poda.
Fuente: Eva Sereno, de la revista especializada española eleconomista.es y atriainnovation.com